Nutzung & Funktionalität
Der Blue-Bot kann auf drei verschiedene Arten programmiert werden:
Tastensteuerung
Die Tastensteuerung ist schnell erklärt: Ich tippe meine Anweisung mithilfe der Richtungstasten auf dem Rücken des Blue-Bot ein und bestätige mit der “Go”-Taste. Sogleich setzt sich der Roboter in Bewegung. Mit der Zeit ist das Geräusch, das der Bodenroboter nach jeder ausgeführten Aktion von sich gibt, etwas irritierend. Doch den Sound kann ich ganz einfach abstellen, indem ich den Lautsprecher-Schalter auf der Unterseite umlege. Fortan blinzelt er nur noch kurz mit den Augen, lässt die Aktion aber akustisch unkommentiert.
Gebe ich nun einen neuen Befehl ein, wird dieser an den zuvor eingegebenen Befehl angehängt. Will ich stattdessen ein neues Kommando vorgeben, muss ich zuerst mit der X-Taste alles komplett löschen. Es ist nicht möglich, einen einzelnen Schritt zu löschen oder zu korrigieren, stattdessen muss ich die komplette Programmierung löschen und von vorne beginnen.
Hier zeigt sich gleichzeitig Vor- und Nachteil der analogen Steuerung: Ich kann zwar 200 Programmierschritte eingeben, und damit deutlich mehr als mit der Programmierleiste, diese werden mir aber nicht angezeigt. So kann ich auch mögliche Fehler nicht nachvollziehen, da mir diese erst auffallen, wenn der Blue-Bot falsch abbiegt und im Graben landet. Nachdem ich die Tastensteuerung ausgiebig ausgetestet habe, wende ich mich der Mischform aus analog und digital zu — der Programmierleiste.
Programmierleiste
Wie bereits erwähnt, befindet sich der Ein/Aus-Schalter auf der Rückseite. Sobald dieser umgelegt wird, leuchtet auf der Vorderseite ein grünes Licht auf, das wohl die Betriebsbereitschaft des Gerätes bestätigen soll. Die Lampe über dem grünen Licht leuchtet allerdings noch nicht. Ich schalte auch den Blue-Bot ein und auf der Platine im Inneren leuchten vier blaue Punkte auf. Auch die Augen erwachen zum Leben, und leuchten in einem weissen Licht. Beide Geräte sind nun startbereit, ich muss sie nur noch miteinander verbinden. Da dies per Bluetooth geschehen soll, drücke ich genau diesen Knopf. Die Lampe über dem grünen Licht, die eben noch aus war, leuchtet nun blau, genauso wie die Augenfarbe des Blue-Bots.
Alles blau = alles klar? Das will ich sogleich testen und nehme mir die Code-Plättchen vor. Diese können beidseitig genutzt werden und weisen auf beiden Seiten dieselben Richtungs- bzw. Befehlstasten auf. Der Unterschied ist, dass der Aufdruck auf der einen Seite hochkant und auf der anderen horizontal ausgerichtet ist. Man kann die Programmierleiste daher nach Belieben im Hoch- oder Querformat aufstellen, ohne dabei mit den Code-Blöcken durcheinanderzukommen.
Denn auf der hochkant ausgerichteten Seite ist das Logo des Herstellers tts mittig an der Unterkante angebracht, auf der Rückseite sieht man einen Mini-Blue-Bot in der rechten unteren Ecke. So fällt die Orientierung leicht, da ich direkt sehe, wie ich die Platten in der Leiste platzieren muss. Die Logik hinter der Leiste wäre also geklärt.
Insgesamt 10 Karten finden auf dem TactileReader Platz. Unter den insgesamt 25 Plättchen finden sich folgende Anweisungen:
- 8x „Vorwärtsfahren“
- 8x „Rückwärtsfahren“
- 4x „Linksdrehung 90°“
- 4x „Rechtsdrehung 90°“
- 1x „Pause“
Sobald ich eine der Karten in die dafür vorgesehene Vertiefung lege, leuchtet darüber ein rotes Lämpchen auf. Diese Lämpchen dienen der Orientierung, denn sobald ich den Startknopf drücke, erlöschen sie und leuchten erst dann (durchgehend) auf, wenn die dort hinterlegte Bewegung ausgeführt wird bzw. wurde. So lässt sich leicht verfolgen, an welcher Stelle sich der Roboter gerade befindet.
Muss sich der Blue-Bot in mehreren Zügen aus einem Hindernis herausmanövrieren oder eine längere Strecke zurücklegen, reichen die 10 Plätze auf der Programmierleiste womöglich nicht aus. Daher kann ich den Roboter nur einen Teil der Strecke fahren lassen, muss dann die Leiste leeren, wieder befüllen und erneut die Starttaste betätigen. Das ist ein Nachteil der Programmierleiste gegenüber der Steuerung über die Richtungstasten auf dem Rücken des Roboters. Denn über diesen Weg kann er sich bis zu 200 Befehle abspeichern und ausführen. Tipp: Es ist laut Bedienungsanleitung möglich, drei Programmierleisten gleichzeitig zu nutzen, indem man diese mit den USB-Anschlüssen miteinander verbindet. So würde sich die Anzahl der Plättchen verdreifachen.
Ein weiterer Tipp ist das Erweiterungsset (bitte separat bestellen), in dem sich 25 neue Kärtchen befinden. Mit diesen können 45°-Drehungen durchgeführt und Aktionen wiederholt werden. So können erste Erfahrungen im Rechnen mit Klammern und in der Multiplikation gemacht werden.
In diesem Beispiel würde der Blue-Bot fünfmal hintereinander eine 45°-Drehung nach rechts ausführen.
Blue-Bot App
Die zugehörige App zum Produkt ist im App Store schnell auffindbar, da man bei der Namensgebung kein Risiko einging und sie schlicht „Blue-Bot” nannte. Die Installation ist einfach und funktioniert schnell und problemlos, eine Anmeldung ist nicht nötig. Übrigens: In der App selbst kann man mit dem virtuellen Blue-Bot fahren, ohne dass man den tatsächlichen Roboter dafür benötigt. Schnuppern Sie also einfach mal in die App rein.
Das Verbinden via Bluetooth klappt ebenfalls auf Anhieb. Nachdem ich Bluetooth auf dem Smartphone aktiviert und den Blue-Bot eingeschaltet habe, wird er mir sofort als Gerät angezeigt. Wie bereits bei der Programmierleiste strahlen auch hier die Augen des Roboters blau, sobald die Verbindung hergestellt ist.
 Erstes Navigieren im Steuerungsmodus
Erstes Navigieren im Steuerungsmodus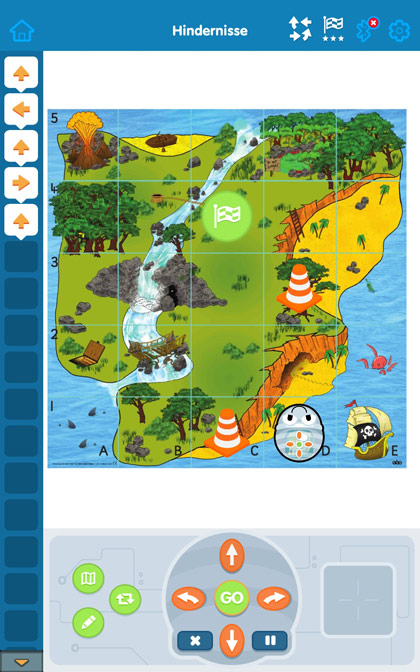 Trotz Hindernissen zum Ziel finden
Trotz Hindernissen zum Ziel finden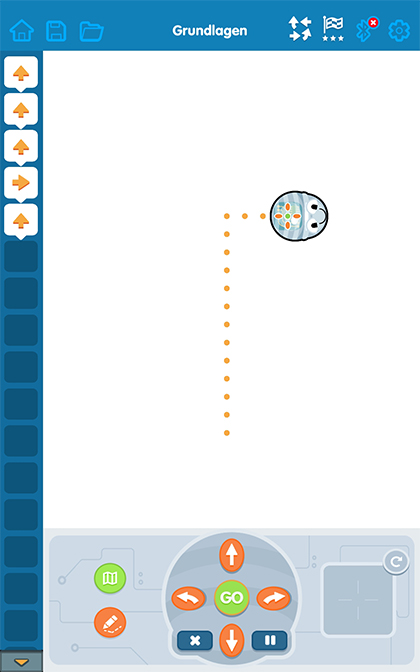 Darstellung des gefahrenen Weges
Darstellung des gefahrenen Weges
Die App ist in drei verschiedene Bereiche aufgeteilt und damit sehr übersichtlich gestaltet. Zur Auswahl stehen:
- Steuerungs-Modus: Auf den ersten Blick wenig spannend, aber für den Einstieg ganz praktisch, denn hier kann ich die virtuelle Steuerung des Bodenroboters kennenlernen. Es stehen allerdings nur die Richtungstasten zur Verfügung und ich sehe den Bot lediglich aus der Vogelperspektive, wie er auf einem grauen Untergrund fährt. Parallel dazu bewegt sich natürlich auch der physische Blue-Bot. In diesem Modus sind die Go-, die Pausen- und Lösch-Tasten ausgeblendet und nicht verfügbar. Daher setzt sich der Roboter sofort in Bewegung und nicht erst, nachdem man den Startknopf betätigt.
- Forscher-Modus: Dieser Modus geht einen Schritt weiter und ermöglicht mir, verschiedene Bodenmatten und damit Hintergründe auszuwählen. Ausserdem sind die Funktionen „Wiederholungen” und „45°-Drehungen” freigeschaltet.
- Challenge-Modus: Während ich in den beiden vorherigen Modi nach Lust und Laune herumfahren konnte, geht es in der Challenge darum, eine Aufgabe zu erfüllen. So muss ich bspw. Hindernissen ausweichen. Oder ich muss das Ziel erreichen, ohne dass mir bestimmte Richtungstasten zur Verfügung stehen. In der Aufgabe „Zufällige Befehle” muss ich anhand eines bereits vorgegebenen Befehls herausfinden, wo der Blue-Bot am Ende rauskommt und dort eine Zielflagge platzieren. Für jede Aufgabe kann ich ausserdem einen Schwierigkeitsgrad wählen (1 - 3 Sterne).
Nettes Feature: Es ist möglich, eigene „Matten” in die App zu laden, um den Bot darauf fahren zu lassen. Dazu tippen Sie auf das Landkarten-Symbol links neben den Steuerungstasten in einem der Modi. Es öffnet sich ein Fenster mit den Matten, die bereits zur Auswahl stehen. In der Ecke links darunter sieht man ein Foto-Icon, um ein Bild zu schiessen bzw. ein Ordner-Icon, um ein Bild hochzuladen.
Tipp: Eine kostenlose Downloadvorlage mit Motiven für eine Matte finden Sie im Betzold Blog.

























